
MAKER: Susumu Konagayoshi, Master of Electronics, Miyazki University Worked at SONY LSI design in charge of Software design of Imaging processing.
PROJECT NAME: Coyote Project
PROJECT INTRO: Coyote Racer
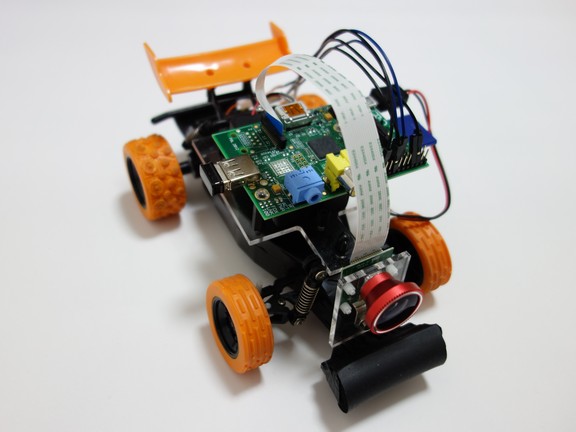
Coyote Racer is a race car that autonomously determines its route based on the information recognized by the camera. It recognizes a predefined marker and determines the relative distance from the car to the marker. Then uses that information to decide its path. Thus, it can, for example, follow a moving marker, attached to some moving object.
Race around a virtual circuit
By placing some marker cones on the floor, you can set up a “virtual circuit” anyplace as you like. And Coyote Racer can race around a virtual circuit autonomously. You can easily move the marker to set up a differently shaped circuit. And you can even change the shape of the circuit on the fly during the race. Coyote Racer recognizes the marker location every time it goes around, so even if the marker location is changed it can easily adapt to the changes.
Robot cat chases radio controlled mouse
In this demo, a cat figure is placed on Coyote Racer and a mouse figure is place on a radio controlled car. Please watch how quickly cat chases the mouse. This demo is an example of how to utilizes the basic functionality of Coyote Racer, i.e. “following a marker”.



{kind=link}
{kind=link}
{kind=link}
{kind=link}